EtherCAT *, Ethernet cho Công nghệ tự động hóa điều khiển, là một hệ thống bus trường công nghiệp dựa trên Ethernet mở, hiệu suất cao nhưng chi phí thấp. Nó được giới thiệu vào năm 2003 và đã trở thành một tiêu chuẩn quốc tế kể từ năm 2007. Mục tiêu phát triển của EtherCAT là áp dụng Ethernet cho các ứng dụng tự động hóa đòi hỏi thời gian cập nhật dữ liệu ngắn (cycle times) với jitter truyền thông thấp (cho mục đích đồng bộ hóa) và phần cứng chi phí thấp.
* EtherCAT® là nhãn hiệu đã đăng ký và công nghệ được cấp bằng sáng chế, được cấp phép bởi Beckhoff Automation GmbH, Đức.
Các tính năng
- Hiệu suất vượt trội
EtherCAT là công nghệ ethernet công nghiệp nhanh nhất, nhưng nó cũng đồng bộ hóa với độ chính xác nano giây. EtherCAT Master là nút duy nhất được phép chủ động gửi khung EtherCAT; tất cả các nút nô lệ khác chỉ chuyển tiếp dữ liệu “nhanh chóng” hoặc điền dữ liệu vào khung khi khung đang di chuyển. Khái niệm này đảm bảo khả năng thời gian thực và khung hình chỉ bị trì hoãn bởi thời gian trễ lan truyền phần cứng. Thời gian phản ứng nhanh hoạt động để giảm thời gian chờ trong quá trình chuyển đổi giữa các bước của quy trình, do đó hiệu suất tuyệt vời của EtherCAT dẫn đến độ chính xác được cải thiện, thông lượng lớn hơn và do đó giảm chi phí.
- Chi phí kinh tế
EtherCAT cung cấp các tính năng của Ethernet công nghiệp nhưng giá tương đương hoặc thậm chí thấp hơn so với hệ thống bus trường cổ điển. Phần cứng duy nhất được yêu cầu bởi thiết bị chính là cổng Ethernet và không cần thẻ giao diện hoặc bộ đồng xử lý đắt tiền. Bản thân EtherCAT không đặt bất kỳ yêu cầu về hiệu suất nào trên các thiết bị nô lệ, giúp giảm chi phí thiết bị. Vì EtherCAT không yêu cầu các bộ chuyển mạch hoặc các thành phần cơ sở hạ tầng hoạt động khác, nên chi phí cho các thành phần này cũng như cài đặt, cấu hình và bảo trì của chúng cũng được loại bỏ.
- Cấu trúc liên kết linh hoạt
Line, tree, star hoặc daisy-chain: EtherCAT hỗ trợ hầu hết tất cả các cấu trúc liên kết và sự kết hợp của các dòng với các nhánh là đặc biệt có lợi. Các cổng được kết nối không chỉ có thể tạo các nhánh mà còn tích hợp trực tiếp vào các mô đun I / O khác nhau, do đó không cần thêm các bộ chuyển mạch hoặc các thành phần cơ sở hạ tầng hoạt động. Lên đến 65.535 thiết bị có thể được kết nối với EtherCAT, vì vậy việc mở rộng mạng hầu như không giới hạn. EtherCAT cung cấp rất nhiều tính linh hoạt về các loại cáp, vì vậy cáp Ethernet công nghiệp rẻ tiền có thể được sử dụng giữa hai nút cách nhau đến 100m trong chế độ 100BASE-TX.
Ứng dụng
- Tự động hóa tòa nhà
- Công cụ bán dẫn
- Bao bì định hình kim loại
- Ép phun
- Hệ thống lắp ráp
- Máy in
- Điều khiển giai đoạn Robotics
- Hệ thống tự động
- Xe dẫn đường
- Tua bin gió
|
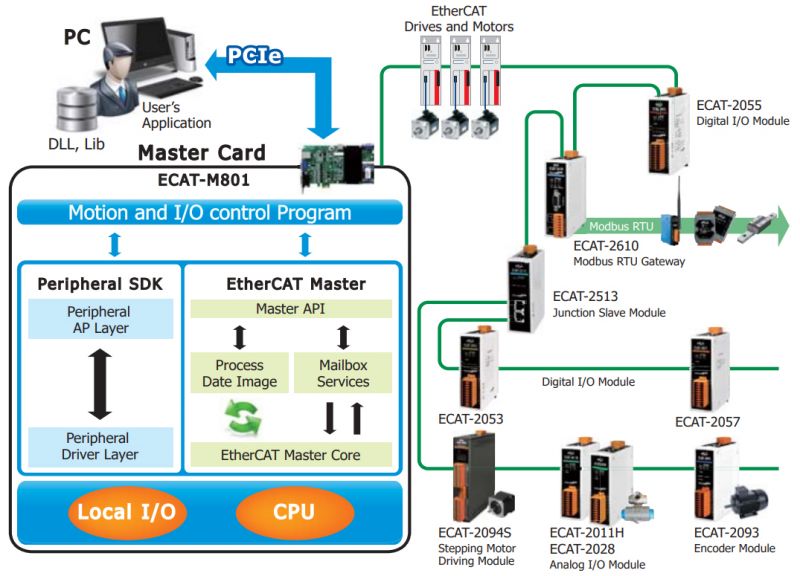
Master Series
|
||||||||
| Model | EtherCAT | Encoder Input | Digital Input & Output | Accessories | ||||
|---|---|---|---|---|---|---|---|---|
| Port | Axes | Slave | Response Speed | Resolution | Channels | Daughter Board | Cable | |
| ECAT-M801-8AX | 1 x RJ-45 | Max. 8 | Max. 64 | 1 MHz | 32-bit | 13-ch DI & 13-ch DO | – | – |
| ECAT-M801-16AX | Max. 16 | |||||||
| ECAT-M801-32AX | Max. 32 | |||||||
| ECAT-M801-8AX/S | 1 x RJ-45 | Max. 8 | Max. 64 | 1 MHz | 32-bit | 13-ch DI & 13-ch DO | Yes | Yes |
| ECAT-M801-16AX/S | Max. 16 | |||||||
| ECAT-M801-32AX/S | Max. 32 | |||||||
|
Junction
EtherCAT junction slaves, respectively. They are designed for realizing flexible wiring by daisy chain and branch.
|
||||||||||
| Model | EtherCAT | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Ports | No. of Nodes | |||||||||
| ECAT-2512 | 3 x RJ-45 (1 IN/2 OUT) | 1 | ||||||||
| ECAT-2513 | 4 x RJ-45 (1 IN/3 OUT) | 2 | ||||||||
| ECAT-2515 | 6 x RJ-45 (1 IN/5 OUT) | 4 | ||||||||
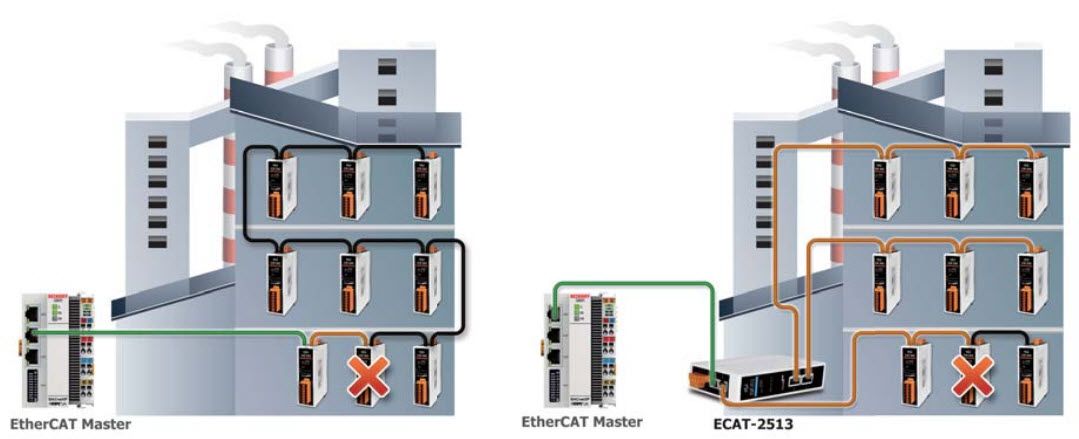
Benefit 1: Translate Daisy-chain to Branch Topology
EtherCAT junction slaves can realize branch topology. This make the cabling easier than daisy-chain topology.
![]()
Benefit 2: Improving the Debugging Efficiency
If a slave device is not working or the cable is disconnected, all the following slave devices on the same network can not communicate with the master controller. With EtherCAT junction slaves, all slave devices can be wired as separated sections.
If one slave device failed, only the slave devices on the same section will be infl uenced. The EtherCAT junction slave keeps the slave devices on other sections communicate with the master controller. Debugging can be done separately, thus improving the debugging efficiency.
|
Converter Series
The ECAT-2511-A and ECAT-2511-B a pair of converters for converting signals between EtherCAT and single mode fiber. Optic fiber prolongs the distance of transmission. It not only provides secure data transmission but also prevents interference from EMS/RFI.
|
|||
| Model | Ethernet | Fiber | |
|---|---|---|---|
| Ports | Ports | Wavelength | |
| ECAT-2511-A | 1 x RJ-45 | 1 x SC connector, Single-Mode | TX: 1310, RX: 1550 nm |
| ECAT-2511-B | TX: 1550, RX: 1310 nm | ||
|
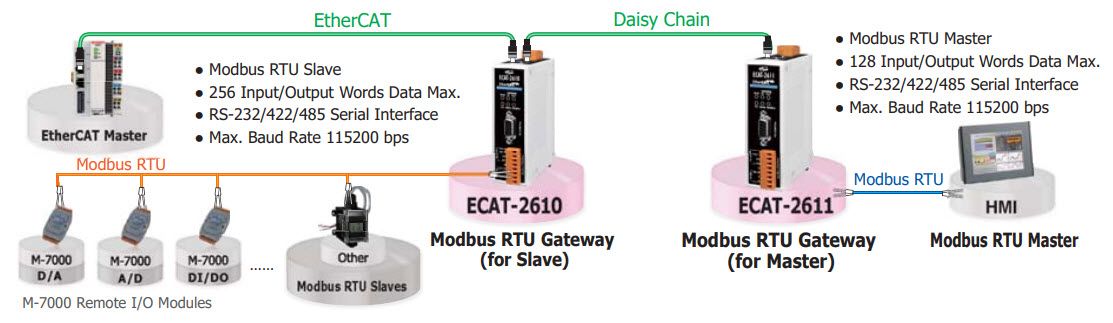
Modbus RTU Gateway
|
|||||
| Model | EtherCAT | Communication | |||
|---|---|---|---|---|---|
| Cycle Time | Distributed Clocks | Protocol | Serial Ports | Supports Power Meter | |
| ECAT-2610 | 10 ms | – | Modbus RTU (Master) | 1 x RS-232/422/485 | – |
| ECAT-2611 | Modbus RTU (Salve) | ||||
| ECAT-2610-DW | Modbus RTU | Yes | |||
|
Stepper Motor Controller/Driver
|
||||||||||
| Model | EtherCAT | Motor Output | Encoder Input | Digital Input | Digital Output | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Cycle Time | DC | Axis | Output Current |
Microsteps per step |
Channel | Frequency | Counting Mode |
Channel | Channel | |
| ECAT-2091S | 0.5 ms (Note 1) |
Yes | 1x stepper motor, (2 phases) |
Peak 1.5A | 256, 128, 64, 32, 16, 8, 4, 2 | 1 | 4 MHz | AB Phase (Note 2) |
2 (Note 3) |
1 |
| ECAT-2094S | 1 axis: 1.0 ms 2 axes: 2.0ms 3 axes: 3.0ms 4 axes: 4.0ms |
Yes | 4x stepper motor, (2 phases) |
4 | 8 (Note 4) |
2 | ||||
| Note 1: 1.0 ms if all PDOs are selected. Note 2: A, B, Z, differential Note 3: Function: limit switch, latch, simple DI Note 4: 2x DI reserved for each axis. Function: limit switch , latch, simple DI |
||||||||||
|
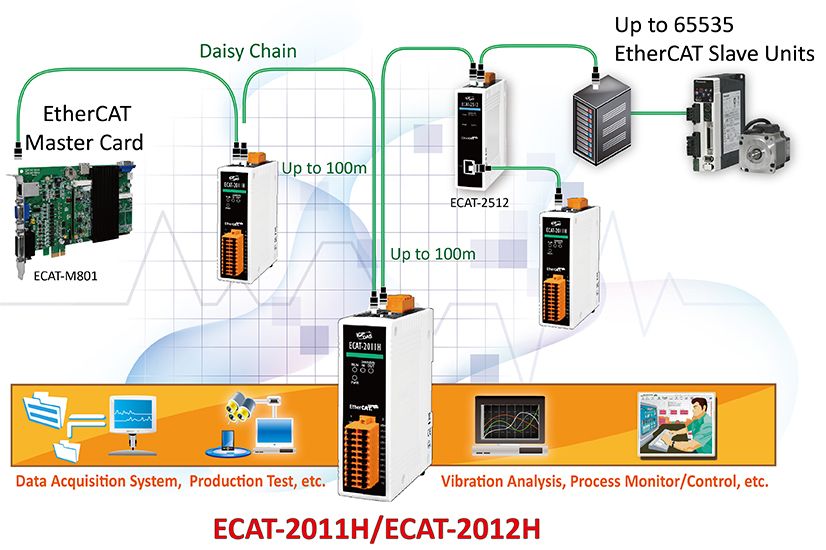
Analog Input
|
|||||||||
| Model | EtherCAT | AI | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Cycle Time | Distributed Clocks | Resolution | Channel | Input Range | Sensor Input | Accuracy | Output Capability | ||
| ECAT-2011H | 1 ms | N/A | 12-bit | 8 Diff/16 S.E | 0 ~ 1 0V, ±10 V, ±5 V, ±2.5 V, 0 ~ 20 mA, ±20 mA, 4 ~ 20 mA or ±4 ~ 20 mA (Software selectable) |
– | 0.2% of LSB | 1k Hz per channel |
|
| ECAT-2012H | 16-bit | 0.05% of LSB | |||||||
| ECAT-2016N | 16-bit | 1 (Strain Gauge) |
±1.25 V, ±600 mV, ±300 mV, ±125 mV, ±80 mV, ±60 mV, ±40 mV, ±30 mV, ±20 mV, ±15 mV, ±10 mV |
Full-Bridge | ±0.1% of FSR | ||||
|
Analog Output
|
|||||||||
| Model | EtherCAT | AO | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Cycle Time | Distributed Clocks | Resolution | Channel | Input Range | Sensor Input | Accuracy | Output Capability | ||
| ECAT-2024 | 1 ms | Yes | 12-bit | 4 | 0 ~ 5 V, +/- 5 V, 0 ~ 10 V, +/- 10 V |
– | ±2 LSB | 10V @ 5 mA | |
| ECAT-2028 | 8 | ||||||||
|
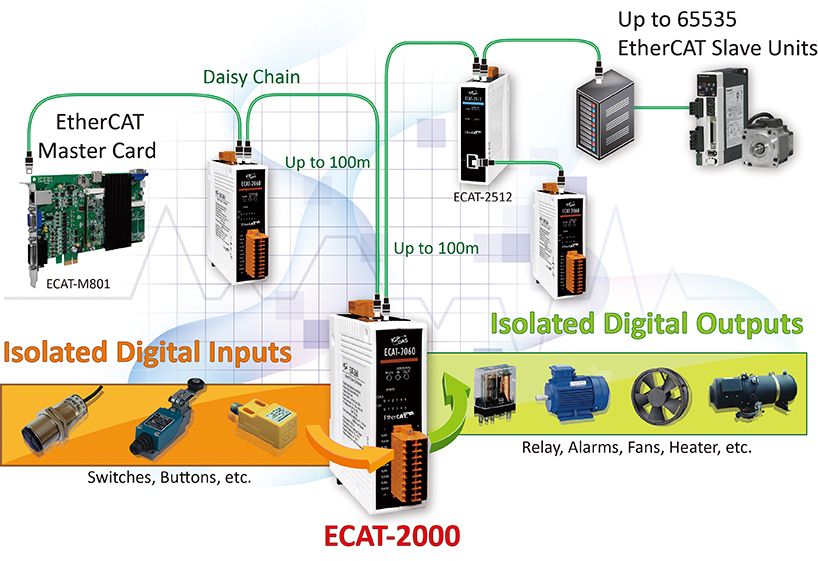
DC Digital I/O
|
||||||||
| Model | EtherCAT | Digital Input | Digital Output | |||||
|---|---|---|---|---|---|---|---|---|
| Cycle Time | Distributed Clocks | Channel | Type | Channel | Type | Max. Load Current | ||
| ECAT-2057 | 200 us | Yes | – | – | 16 | Open Emitter (Source) |
100 mA/Channel | |
| ECAT-2057P | ||||||||
| ECAT-2057-NPN | ||||||||
| ECAT-2057-8P8N | 8 | Open Collector (Sink) |
||||||
| Open Emitter (Source) |
||||||||
| ECAT-2057-32 | 32 | Open Emitter (Source) |
500 mA/channel | |||||
| ECAT-2045 | 200 us | Yes | – | – | 16 | Open Collector (Sink) |
700 mA/channel | |
| ECAT-2045-32 | 1 ms | 32 | 500 mA/channel | |||||
| ECAT-2051 | 200 us | Yes | 16 | Dry (Source), Wet (Sink/Source) |
– | – | – | |
| ECAT-2051-32 | 1 ms | 32 | ||||||
| ECAT-2050 | 200 us | Yes | 13 | Dry (Source), Wet (Sink/Source) |
4 | Open Collector/Emitte (Jumper Selectable) |
100 mA/channel | |
| ECAT-2052 | 200 us | Yes | 8 | Wet (Sink/Source) | 8 | Open Emitter (Source) |
100 mA/channel | |
| ECAT-2052-NPN | Open Collector (Sink) |
|||||||
| ECAT-2053 | 200 us | Yes | 16 | Wet (Sink/Source) | – | – | – | |
| ECAT-2055 | 200 us | Yes | 8 | Dry (Source), Wet (Sink/Source) |
8 | Open Collector (Sink) |
700 mA/channel | |
| ECAT-2055-32 | 1 ms | 16 | 16 | |||||
| ECAT-2060 | 200 us | Yes | 6 | Dry (Source), Wet (Sink/Source) |
6 | Relay, Form A (SPST-NO) |
5 A/channel | |
| ECAT-2061 | – | – | 16 | |||||
|
Encoder Counter
|
|||||||||
| Model | EtherCAT | Encoder Input | Compare Trigger Output | External Latch Input | |||||
|---|---|---|---|---|---|---|---|---|---|
| Cycle Time | Distributed Clocks | Type | Channel | Resolution | Frequency | Counting Mode | Channel | Channel | |
| ECAT-2093 | 0.5 ms | Yes | Incremental | 3 | 32-bit | 4 MHz | CW/CCW, Pulse/Direction, A/B Phase |
– | 3 |
| ECAT-2092T | 2 | 2 | 2 | ||||||