Để điều khiển chuyển động (kiểm soát tốc độ và vị trí) chúng ta có thể sử dụng phương pháp PWM và PTO. Một đầu ra PLC được chỉ định sử dụng PWM hoặc PTO (chỉ một trong hai, không phải cả hai). Có nhiều sự nhầm lẫn khi sử dụng hai thuật ngữ này, những người thường sử dụng các bộ điều khiển micro thường gọi nó PWM bất kể nó là PTO hay PWM. Đối với PLC thì chúng ta cần phải biết về sự khác biệt này.
Nội dung
PWM là gì?
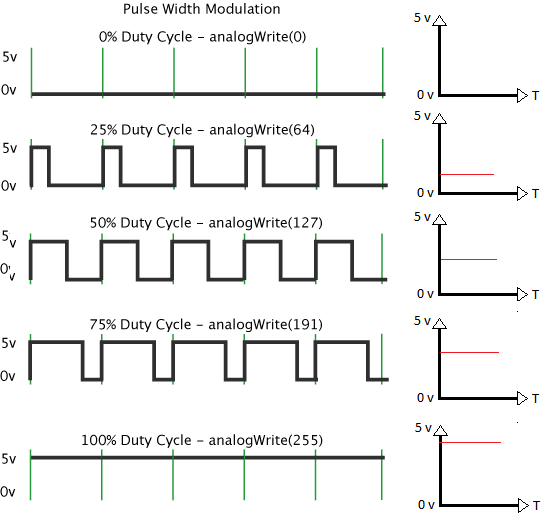
PWM là từ viết tắt của cụm từ “Pulse Width Modulation” được dịch sang tiếng việt là “điều chế độ rộng xung”. PWM là một kỹ thuật điều chế được sử dụng để mã hóa một thông số thành một tín hiệu xung. Mặc dù kỹ thuật điều chế này có thể được sử dụng để mã hóa thông tin để truyền tải, nhưng công dụng chính của nó là cho phép điều khiển công suất cung cấp cho các thiết bị điện, đặc biệt là đối với tải quán tính như động cơ.
PTO là gì?
PTO là từ viết tắt của cụm từ “Pulse Train Output” dùng để định vị chính xác hoặc kiểm soát vận tốc chính xác. PTO thường được dùng để phát xung điều khiển cho Driver của Servo Motor hay Stepper Motor.
Phân biệt PWM và PTO
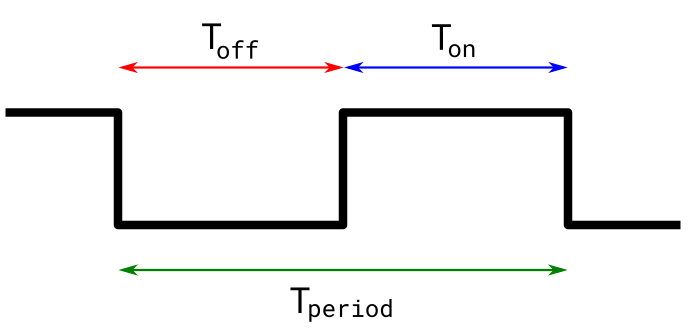
Cả PWM & PTO đều là những bộ tạo xung, tuy nhiên PTO là tạo ra chuỗi xung vuông có tỷ lệ T(on)/ T(period) là không đổi, còn PWM là tạo ra chuỗi xung vuông có tỷ lệ T(on)/ T(period) biến thiên. PTO thường được dùng để phát xung điều khiển cho Driver của động cơ Servo hay động cơ bước (Stepper Motor). PWM thường được dùng để điều khiển trong điều khiển động cơ một chiều, bộ gia nhiệt hay điều khiển biến tần…
Xung PWM
- Thay đổi chu kỳ hoạt động trong khi tần số không đổi.
- T (chu kỳ – period) được cố định khi nó đang được sử dụng. Thường được cấu hình bằng phần cứng nhưng có thể được điều chỉnh bằng phần mềm – không phải trong khi chạy xung.
- Phần mềm có thể thay đổi tỷ lệ T (off) với T (on).
Điều khiển chuyển động: bộ khuếch đại công suất động cơ DC kiểu truyền thống thường sử dụng phương pháp này để thiết lập điểm đặt. Sự thay đổi trong chu kỳ nhiệm vụ có thể được tiến hành bởi một mạch analog mà cần không sử dụng bộ điều khiển micro.
Điều khiển vòng lặp PID có thể xuất ra đầu ra PWM. Ngoài ra, người dùng có thể viết một chương trình sử dụng nó như thể một đầu ra analog để thay đổi chu kỳ nhiệm vụ PWM. Nó chỉ kiểm soát tốc độ.
Xung PTO
- Thay đổi tần số trong khi chu kỳ hoạt động vẫn ở mức 50%.
- T (period) rất đa dạng. Việc kiểm soát được thực hiện từ phần mềm.
- Tỷ lệ T (off) so với T (on) có thể được cố định ở mức 50%: 50%.
Điều khiển chuyển động: được biết đến nhiều nhất với điều khiển vòng hở của động cơ bước. Bộ khuếch đại động cơ bước đảm bảo tăng khoảng cách cố định cho mỗi xung nhận được. Khoảng thời gian của mức tăng được đặt bởi tần số của xung. Phương pháp này được sử dụng phổ biến hơn PWM, được sử dụng cho động cơ bước và động cơ servo. Vị trí (và tốc độ) được kiểm soát ngay cả khi chỉ sử dụng điều khiển vòng hở.
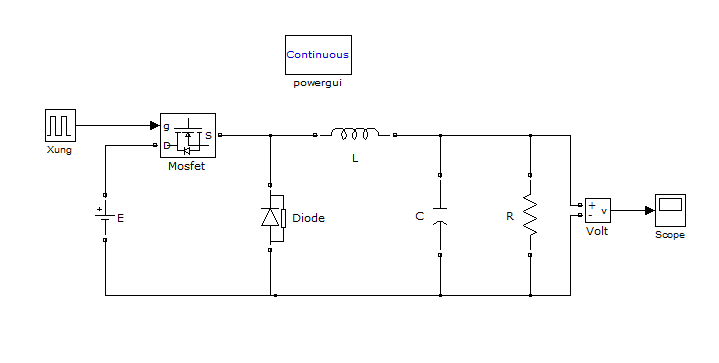
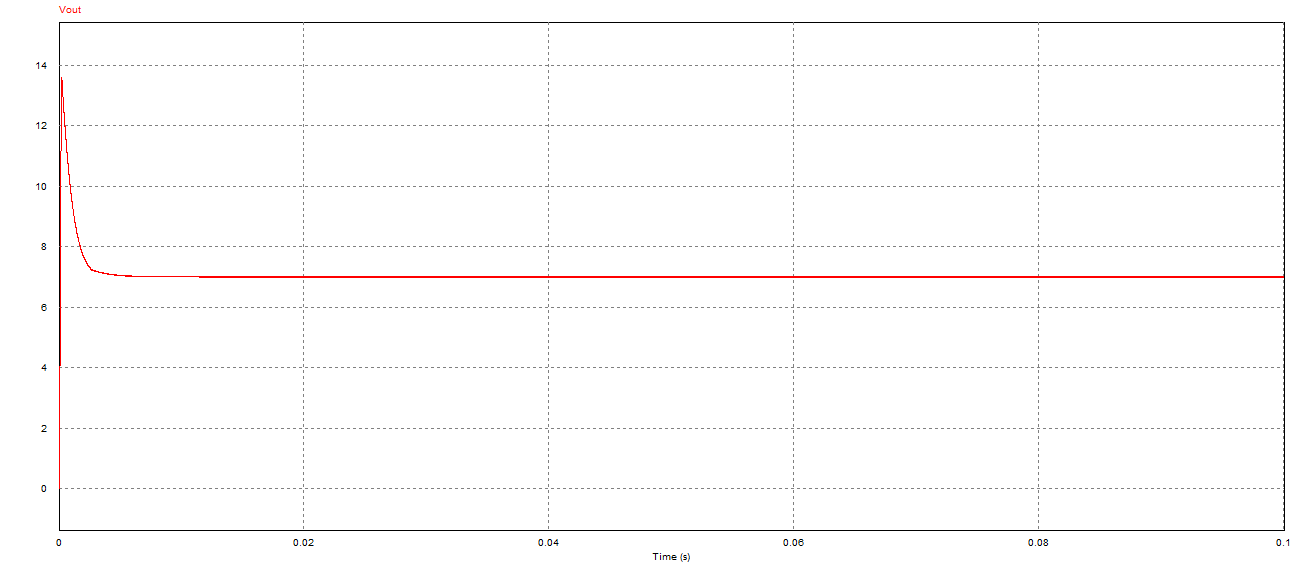
Áp dụng nguyên tắc phát xung PWM
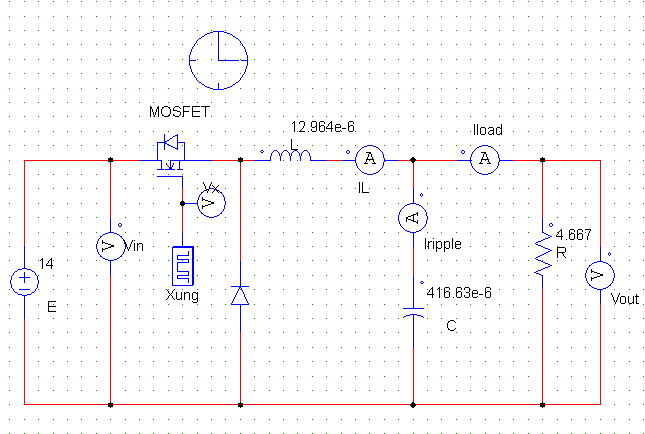
Thiết kế bộ biến đổi DC-DC Buck để cấp nguồn cho tải từ nguồn sơ cấp với các yêu cầu sau:
- Vin = 14 V
- Vout = 7 V
- ILoad = 1.5 A
- Fsw = 90 kHz
- Iripple = 0.7 I A
- Độ đập mạch điện áp: 10 mV
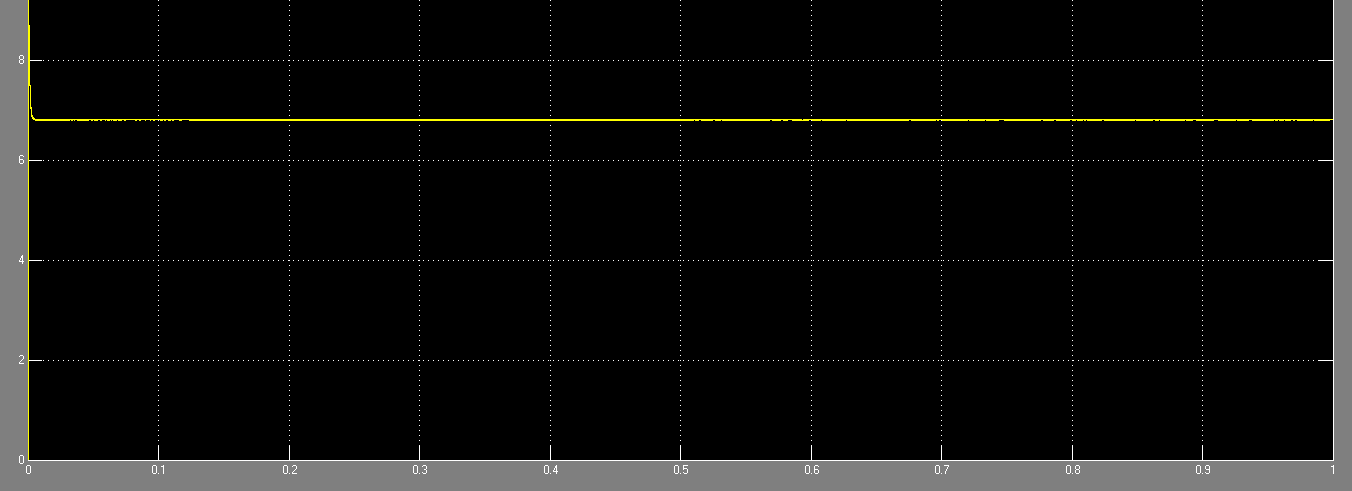
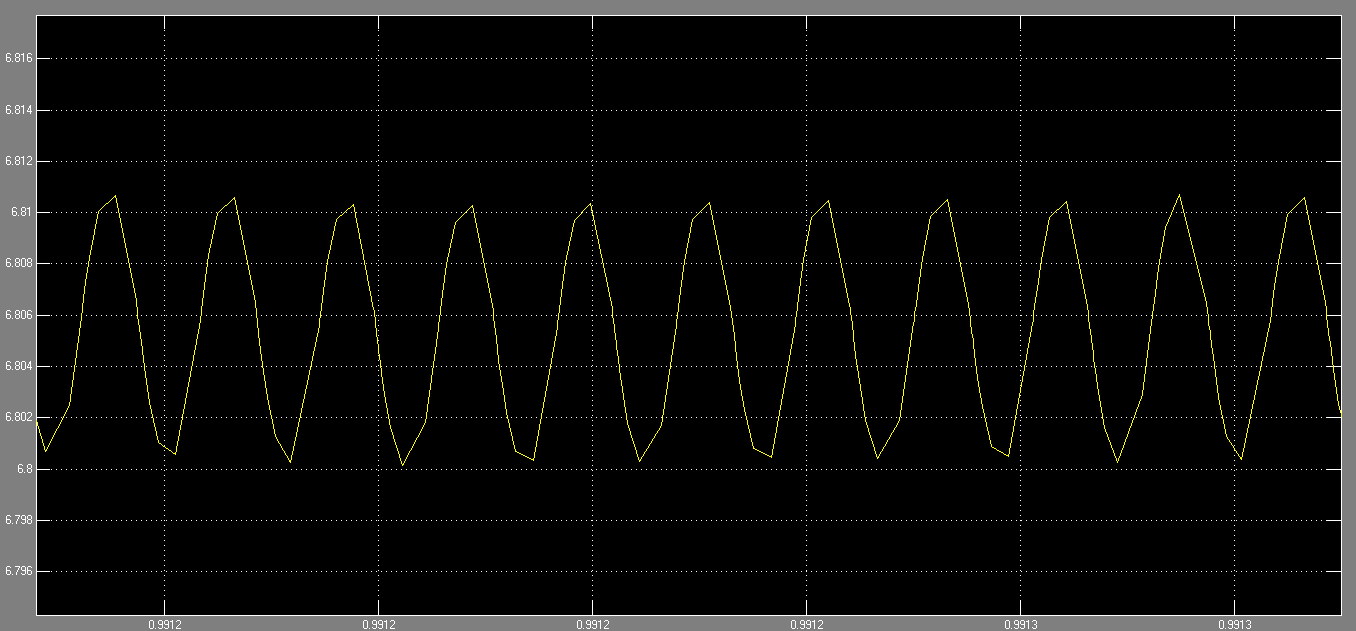
Kết quả mô phỏng