Đâu là lý do mà xe tự hành trở nên đắt đỏ phần 1
Nhiều người dân thành thị trẻ muốn sở hữu một chiếc ô tô, nhưng không giống như các thế hệ trước, nhu cầu di chuyển của họ thay đổi. Khi cần di chuyển một quãng đường xa đáng kể, chẳng hạn, hơn 5 dặm (8 km), họ sử dụng điện thoại của họ để gọi dịch vụ như Uber (hoặc một chiếc xe từ một công ty đi xe chia sẻ tương tự). Nếu họ cần đi dưới một dặm (1.8 km), họ có thể đi bộ hoặc sử dụng các dịch vụ khác, chẳng hạn như xe tay ga Lime và Bird ngày càng phổ biến hoặc ở một số thành phố, hoặc dịch vụ chia sẻ xe đạp.
Vấn đề là hệ sinh thái di chuyển như một dịch vụ của ngày hôm nay rằng thường không làm tốt công việc trong các khoảng cách trung gian,nhưmột vài dặm. Gọi một xe Uber hoặc Lyft cho những chuyến đi ngắn như vậy thường đắt đỏ, trong khi các dịch vụ như xe ga hoặc xe đạp chia sẻ lại quá không lý tưởng với nhiều người. Vì vậy, khoảng cách 1- 5 dặm có thể là một thách thức. Hơn nữa, theo thống kê, những chuyến đi như vậy có thể chiếm hơn một nửa nhu cầu.
Nhiều chuyến đi trong khoảng cách trung gian này diễn ra trong môi trường có tốc độ hạn chế, chẳng hạn như khuôn viên trường đại học và khu công nghiệp, nơi hiện có thể hợp lý về mặt kinh tế và công nghệ để triển khai các phương tiện tự hành, tốc độ thấp chạy bằng điện. Một công ty khởi nghiệp có ý định làm cho hình thức vận chuyển này trở nên phổ biến là PerceptIn. Hiện PerceptIn có phương tiện tự động hoạt động tại các địa điểm du lịch ở Nara và Fukuoka, Nhật Bản; tại một khu công nghiệp ở Thâm Quyến, Trung Quốc và hiện đang sắp xếp các phương tiện của mình để đưa đón mọi người xung quanh Fishers, Ind., địa điểm của trụ sở công ty.
Bởi vì các phương tiện tự hành nhỏ bé không bao giờ vượt quá 20 dặm (32 km) mỗi giờ và không pha trộn với giao thông tốc độ cao, họ không gây ra cùng một loại vấn đề an toàn nảy sinh với xe ô tô tự trị mà đi trên những con đường giao thông và đường cao tốc thông thường. Mặc dù lái xe tự động là một nỗ lực phức tạp, nhưng thách thức thực sự đối với PerceptIn không phải là tạo ra một phương tiện có thể tự lái trong những môi trường như vậy – công nghệ để làm điều đó giờ đây đã được thiết lập tốt – mà là giảm chi phí.
Những chiếc xe tự hành đắt tiền có thể khiến bạn phải trả khoảng 300.000 đô la Mỹ do các công nghệ cần thiết để đảm bảo hoạt động của xe trong môi trường phức tạp. Ngược lại, mẫu xe PerceptIn hiện được bán ở mức giá khoảng 70.000 USD và giá chắc chắn sẽ giảm trong tương lai. Tại sao lại có sự khác biệt như vậy?
Tại sao xe tự hành lại đắt?
Hãy bắt đầu bằng cách giải thích tại sao những chiếc xe tự hành thường đắt tiền.Tóm lại, nó ĐẮT vì các cảm biến và máy tính họ mang theo rất đắt tiền.
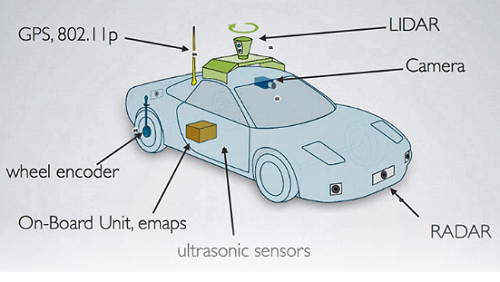
Bộ cảm biến cần thiết cho việc lái xe tự động thông thường bao gồm một máy GPS cao cấp, nắp đậy (phát hiện ánh sáng và phạm vi), một hoặc nhiều máy quay video, radar và sonar. Chiếc xe cũng cần ít nhất một máy tính rất mạnh.
Các máy thu GPS được sử dụng trong bối cảnh này không giống như cái được tìm thấy trong điện thoại của bạn. GPS sử dụng trên các phương tiện tự có khả năng động học thời gian thực cho vị trí có độ chính xác cao, sửa lỗi xuống còn 10 cm. Các thiết bị này thường có giá khoảng 4.000 đô la. Tuy nhiên, ngay cả các máy GPS đắt tiền này cũng không thể cung cấp thông tin chính xác vị trí của chiếc xe. Trong một số trường hơp tín hiệu có thể bị trễ, bị tắt hoặc bị nhiễu. Ngoài ra, GPS cần một tầm nhìn không bị cản trở lên bầu trời. Trong các môi trường kín, chẳng hạn như các đường hầm, thiết bị GPS sẽ không hoạt động.
May mắn thay, các phương tiện tự trị có những cách khác để tìm ra vị trí của chúng. Cụ thể, họ có thể sử dụng ma trận, xác định khoảng cách đến các vật bằng cách quét một chùm tia laser và đánh giá thời gian ánh sáng phản xạ trở lại. Một thiết bị điển hình cho xe tự hành có phạm vi quét 150 mét và lấy mẫu hơn 1 triệu điểm không gian mỗi giây.
Quét như vậy có thể được sử dụng để xác định các hình dạng khác nhau trong môi trường xung quanh. Sau đó, máy tính trên xe sẽ so sánh các hình dạng quan sát được với các hình dạng được ghi trong bản đồ kỹ thuật số độ nét cao của khu vực, cho phép nó theo dõi vị trí chính xác của chiếc xe mọi lúc. Lidar cũng có thể được sử dụng để xác định và tránh các chướng ngại vật thoáng qua, chẳng hạn như người đi bộ và xe khác.
Lidar là một công nghệ tuyệt vời, nhưng nó tồn tại hai vấn đề. Đầu tiên, các thiết bị này cực kỳ đắt đỏ: Một thiết bị Lidar cao cấp trên xe tự hành có thể dễ dàng tiêu tốn hơn 80.000 đô la, mặc dù chi phí đang giảm và đối với các ứng dụng tốc độ thấp, một thiết bị phù hợp chỉ có giá khoảng 4.000 đô la. Ngoài ra, thiết bị Lidarquang học có thể không cung cấp các phép đo hợp lý trong thời tiết xấu, chẳng hạn như mưa lớn hoặc sương mù.
Điều tương tự cũng đúng đối với các camera được tìm thấy trên các phương tiện này, phần lớn được sử dụng để nhận biết và theo dõi các vật thể khác nhau, như ranh giới của làn đường lái xe, đèn giao thông và người đi bộ. Thông thường, nhiều camera được gắn xung quanh xe. Những máy camera này thường chạy ở tốc độ 60 khung hình mỗi giây và nhiều máy camera được sử dụng có thể tạo ra hơn 1 gigabyte dữ liệu thô mỗi giây. Tất nhiên, việc xử lý lượng thông tin khổng lồ này đặt ra nhu cầu tính toán rất lớn trên máy tính đặt trên xe.
Các hệ thống radar và sonar được tìm thấy trong các phương tiện tự hành được sử dụng để tránh chướng ngại vật. Các bộ dữ liệu mà chúng tạo ra cho thấy khoảng cách từ vật thể gần nhất trong đường dẫn xe cộ. Ưu điểm chính của các hệ thống này là chúng hoạt động trong mọi điều kiện thời tiết. Sonar thường có phạm vi hoạt động tới 10 mét, trong khi radar thường có tầm quét tới 200 mét. Giống như máy ảnh, các cảm biến này tương đối rẻ tiền, thường có giá dưới 1.000 USD mỗi chiếc.
Nhiều phép đo cung cấp cảm biến như vậy được đưa vào các máy tính của xe, chúng phải tích hợp tất cả thông tin này để tạo ra sự hiểu biết về môi trường. Mạng lưới thần kinh nhân tạo và học tập sâu, một cách tiếp cận đã phát triển nhanh chóng trong những năm gần đây, đóng một vai trò lớn ở đây. Với các kỹ thuật này, máy tính có thể theo dõi các phương tiện khác đang di chuyển gần đó, cũng như của người đi bộ băng qua đường, đảm bảo phương tiện tự trị không va chạm với bất cứ ai hoặc bất cứ ai.
Tất nhiên, các máy tính trên xe tự hành phải làm nhiều việc hơn là chỉ tránh đụng phải thứ gì đó. Họ phải đưa ra một số lượng lớn các quyết định về nơi để lái và tốc độ di chuyển. Do đó, các máy tính của xe cộ cầntạo ra các dự đoán về chuyển động sắp tới của các phương tiện gần đó trước khi quyết định một kế hoạch hành động dựa trên những dự đoán đó và nơi mà người sử dụng cần tới.
nguồn: http://automation.net.vn/